
الوصف
إحدى المشاكل في صمام التحكم هي الاحتكاك. تظهر هذه المشكلة في الشكل التالي:
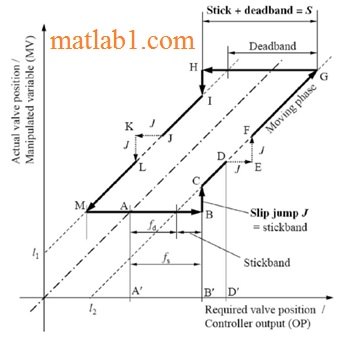
وتتكون من أربعة مكونات: الفرقة الميتة ، وشريط العصا ، والقفز الانزلاقي ، ومرحلة الحركة.
الاحتكاك هو الاحتكاك الساكن الذي يجب التغلب عليه لتمكين الحركة النسبية للأجسام الثابتة المتلامسة. المصطلح هو عبارة عن مصطلح “احتكاك ثابت” ، وربما يتأثر أيضًا بفعل “عصا”.
يحد وجود اللاخطية ، على سبيل المثال ، التقوية ، والفرقة الميتة في صمام التحكم من أداء حلقة التحكم. يعتبر الاحتكاك مشكلة الصمام الأكثر شيوعًا في صناعة المعالجة.
نحن ننتج بيانات للخوارزمية الخاصة بنا باتباع نموذج Simulink:

تم تصنيع نموذج Simulink بناءً على الورقة التالية:
شودري ، إم إس ، ثورنهيل ، إن إف ، وشاه ، إس إل (2005). نمذجة تماسك الصمام. ممارسة هندسة التحكم ، 13 (5) ، 641-658 ، شيكاغو.
يمكن للمستخدم تحديد حجم العصا / العصا (ق) وحجم القفز الانزلاقي (j) في نموذج Simulink.
نقوم باستخراج الميزات من إشارة الخرج. ثم يتم استخدام Support Vector Machine (SVM) للكشف عن الإيقاع.
بعد تدريب جهاز SVM ، نستخدم جهاز SVM مدربًا لاكتشاف التقلص في بيانات الاختبار. يمكن لجهاز SVM الكشف عن حالة الموجة والفرقة الميتة.
المراجعات
لا توجد مراجعات بعد.