
الوصف
وصف
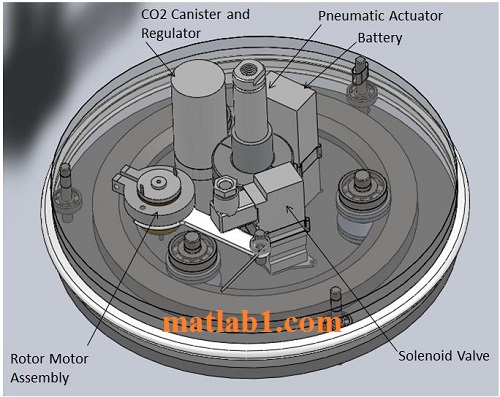
كان TopBot مشروعًا تم إنشاؤه لاستكشاف الاستقرار السلبي وعناصر التحكم في الحلقة المفتوحة كوسيلة للتنقل. سيتم استغلال الثبات السلبي للديناميكيات العليا كطريقة للحفاظ على TopBot صحيحًا بينما سيتم استكشاف آلية التنقل للسماح بنوع من الحركة. هذا لا يسمح فقط بنوع بسيط من الاستقرار الحسابي ولكن يمكن استخدامه أيضًا في حالات الكواكب منخفضة الجاذبية كشكل من أشكال استكشاف الفضاء حيث يمكن أن يوفر التنقل من موقع إلى موقع بديلًا موفرًا للطاقة للدحرجة أو التنقل فوق التضاريس الوعرة.
الغرض من TopBot هو بدلاً من ذلك إلقاء نظرة مفصلة على شكل طبيعي من الاستقرار واستغلال فوائده لتحقيق الاستقرار في النظام وكذلك إنشاء شكل فريد من أشكال الحركة.
كود MATLAB:
إرتفاع القفز وسرعتها
حسابات صاروخ الدفع البارد
عدد طلقات علبة ثاني أكسيد الكربون
سرعة الدوران الأولية للدوار
تحليل RK4 لـ TopBot
كود اردوينو:
زاوية التحول من مقياس التسارع
فهرس
بيولي ، توماس. محاكاة النهضة العددية والتحسين والتحكم. سان دييغو: رينيسانس برس ، 2012.
ابتكارات حقيقية. منظم مركب. اختصار الثاني. ٧ مايو ٢٠١٢ <http://www.genuineinnovations.com/composite-regulator.html>.
جينسبرج ، جيري هـ.ديناميكا الهندسة المتقدمة ، الطبعة الثانية. نيويورك: مطبعة جامعة كامبريدج ، 1995.
مكماستر كار. اختصار الثاني. 7 مايو 2012 <http://www.mcmaster.com/>.
الروبوتات ، نحل العسل. نقل الطاقة والإشارة. 1999. 23 05 2012
<http://www.honeybeerobotics.com/mechanisms/sliprings>.
SMC Pneumatics Inc. سلسلة NVK 300. اختصار الثاني. 7 مايو 2012
<http://content.smcetech.com/pdf/NVKF300.pdf>.
كود Arduino و MATLAB لروبوت كروي جوي وخفيف الوزن للغاية
كود Arduino للملاحة الآلية المستقلة وتطبيقات تجنب العقبات على القمر

المراجعات
لا توجد مراجعات بعد.