
الوصف
وصف
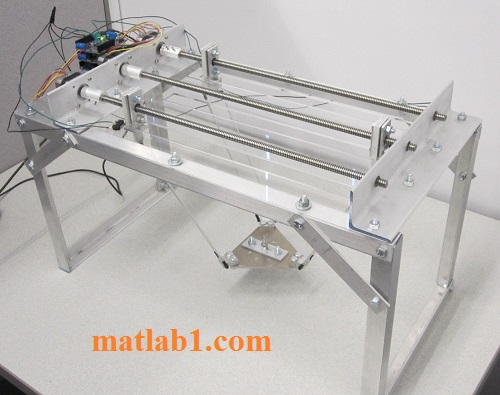
من أجل التحقق من المعادلات الحركية ، تم إنشاء LDR المادية. تم إنشاء الوصلات المنشورية من منزلقات ملولبة على براغي من الرصاص ، يتم تشغيلها بواسطة محركات متدرجة.
تم استخدام الوصلات الكروية والمقبس للمفاصل الكروية. يتم إجراء الحسابات الحركية والتحكم في المحرك باستخدام Arduino Uno ، الذي يتلقى أوامر الموضع عبر كابل USB من رسول تسلسلي ، وفي هذه الحالة كمبيوتر محمول. تم تحويل أمر الموضع هذا بعد ذلك إلى مسافة خطية لكل شريط تمرير ، والتي تم تحويلها بدورها إلى عدد من العلامات لكل خطوة لتدويرها. يتم تخزين البيانات الموضعية على Arduino EEPROM ، والتي تحتفظ بالمعلومات حتى عند انقطاع التيار الكهربائي. تم وضع مفاتيح الاتصال على طول المسار المنزلق في مواقع معروفة ، مما يسمح بإعادة تعيين الروبوت إلى موضع معروف في حالة تلف البيانات الموضعية أو فقدها. يوضح الشكل 1 LDR المبني.
LIST OF REFERENCES
[1] M. J. Uddin, S. Refaat, S. Nahavandi and H. Trinh, “Kinematic Modelling of a Robotic Head with Linear Motors,” Deakin University, School of Engineering and Technology, Geelong.
[2] R. Clavel, “A Fast Robot with Parallel Geometry,” in 18th International Symposium on Industrial Robotics, Lausanne (Switzerland), 1998.
[3] R. Clavel, “Device for the positioning of an element in space”. U.S. Patent 4,976,582, 11 Dec 1990.
[4] M. Stock and K. Miller, “Optimal Kinematic Design of Spatial Parallel Manipulators: Application to the Linear Delta Robot,” ASME Journal of Mechanical Design, vol. 125, 2003.
[5] Q. Yuan, S. Ji, Z. Wang, G. Wang, Y. Wan and L. Zhan, “Optimal Design of the Linear Delta Robot for a Prescribed Cuboid Dexterous Workspace based on Performance Chart,” in WSEAS Int. Conf. on Robotics, Control, and Manufacturing Technology, Hangzhou, 2008.
[6] X.-J. Liu, J. Wang, K.-K. Oh and J. Kim, “A New Approach to the Design of a DELTA Robot with a Desired Workspace,” Journal of Intelligent and Robotic Systems, vol. 39, pp. 209-225, 2004.
[7] Y. Zhao, “Dynamic optimum design of a three translational degrees of freedom parallel robot while considering anisotrophic property,” Robotics and Computer-Integrated Manufacturing., vol. 29, pp. 100-112, 2012.
[8] M. A. Laribi, L. Romdhane and S. Zeghloul, “Analysis and dimensional synthesis of the DELTA robot for a prescribed workspace,” Mechanism and Machine Theory, vol. 42, pp. 859-870, 2007.
[9] FANUC Robotics, FANUC Robot M-2000iA Mechanical Unit Operators Manual, Rochester Hills, MI: FANUC America, 2014.
[10] S. Kucuk and Z. Bingul, Industrial Robotics: Theory, Modelling, and Control, Berlin, 2006.
[11] Y.-J. Chiu and M.-H. Perng, “Forward Kinematics of a General Fully Parallel Manipulator with Auxillary Sensors,” The International Journal of Robotics Research, 1 May 2001.
[12] L.-W. Tsai, Robot Analysis, New York: John Wiley & Sons, 1999.
[13] J.-H. Ryu, Parallel Manipulators, New Developments, I-Tech Education, 2008.
[14] E. A. Baran, T. E. Kurt and A. Sabanovic, Lightweight Design and Encoderless Control of a Minature Direct Drive Linear Delta Robot, Istanbul: Sabanci University.
[15] J. L. Irwin, J. M. Pearce, G. Anzolone and D. E. Oppliger, “The RepRap 3-D Printer Evolution in STEM Education,” in 121st ASEE Annual Conference & Exposition, Indianapolis, 2014.
كود اردوينو لحركة الذراع للروبوت البشري
إعادة بناء ثلاثية الأبعاد في الوقت الحقيقي للروبوتات الجراحية المستمرة الحاذقة
كود اردوينو لوظيفة البحث عن ضوء الشمس في الروبوت

المراجعات
لا توجد مراجعات بعد.