
الوصف
وصف
بناء قاعدة Zoetrope
كان تصميم القاعدة بسيطًا إلى حد ما في البداية. لقد صممت صفيحة دائرية تجلس عليها الزوتروب وتعلق على عمود المحرك باستخدام برغي صغير. لقد استأجرت ميكانيكيًا لطحن صفيحة قوية من الألومنيوم يمكنها تحمل وزن أي زويتروب ، لكنها ستكون أيضًا خفيفة الوزن عند توصيلها بمحرك دوار. هذا من شأنه أن يمنع التواء محتمل للوحة ويضمن الاستقرار. تم تزويد اللوحة أيضًا بمسمار بوصة في الأعلى للسماح بالتشديد لتأمين zoetrope ومحاذاة التسجيل أثناء الرسوم المتحركة.
يمكن أن تعلق اللوحة بعمود 12VDC ، 0.166A Gearhead Motor34 أو محرك متدرج 1.8 درجة ، 12VDC ، 0.4A حسب الحاجة – هذه كانت المحركات التي اشتريتها لهذا المشروع. استخدم محرك التيار المستمر إعدادًا بسيطًا للغاية حيث تم توصيل المحطات الطرفية بتيار متردد إلى مصدر طاقة تيار مستمر 36 وتم التحكم في سرعة الدوران عن طريق تحويل الطاقة لأعلى أو لأسفل ، ولكن مع الحرص على عدم تجاوز حد 12VDC للمحرك. يوفر هذا المحرك عزم دوران كبير ؛ ومع ذلك ، لم يكن دقيقًا. من ناحية أخرى ، احتاج محرك السائر إلى أكثر قليلاً من مصدر طاقة.
تم بناء المحركات السائر بمجموعتين من الملفات ، بما في ذلك عادةً الصنابير المركزية. يتطلب الدوار ذو المغناطيس الدائم تنشيط الملفات بترتيب زمني دقيق للدخول في اتجاه واحد أو آخر. كان لكل ملف إما مقدمة سلبية وإيجابية ، أو تقدم سلبي وإيجابي وأرضي اعتمادًا على متطلبات التطبيق. تحتوي محركات التيار المستمر أيضًا على مغناطيس دائم ، ولكن مع ملف واحد في الدوار ، وعادة ما يكون مجرد إعداد سلبي وإيجابي للرصاص. لتشغيل محرك تيار مستمر ، يمكنك ببساطة تنشيط الملف عن طريق تطبيق جهد على الطرفين. نظرًا لأن المحركات السائر بها المزيد من الخيوط ، فإنها تتطلب وحدة تحكم أو سائقًا للتشغيل.
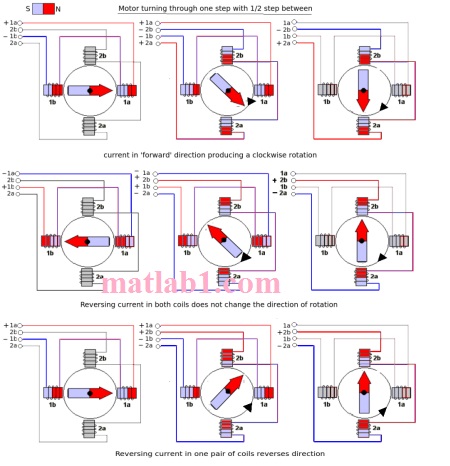
يتم تنشيط ملفات المحرك السائر بالتتابع لكل خطوة
استخدم معظم التصوير محرك السائر بسبب القدرة على تحويله بشكل موثوق إلى موضع دقيق ومتسق إلى حد ما. من أجل تحقيق ذلك ، استخدمت Arduino Uno R3 Board38 مع Adafruit Motorshield V239 للتحكم في سرعة الدوران ودقة السائر. لقد كتبت رمزًا واستخدمت لوحة توصيل بأزرار للسماح بالخطوات الكاملة و microstepping40 ، للأمام والخلف ، جنبًا إلى جنب مع زر لتحرير المحرك. نظرًا لأن بعض zoetropes كانت كبيرة إلى حد ما ، فقد كانت هناك حاجة إلى الكثير من عزم الدوران والطاقة لتشغيل السائر لتحريك العمود إلى ما بعد القصور الذاتي الأولي ، وإيجاد السرعة المتسارعة المناسبة للتعامل مع القصور الذاتي المنعكس عند الدوران.

كود اردوينو للتحكم في المحركات الحثية ثلاثية الطور
المراجعات
لا توجد مراجعات بعد.