
الوصف
لتوفير أنماط متغيرة بمرور الوقت من المواد المخففة للتصوير المرمز زمنيًا ، قمنا ببناء نظام تحديد موقع القناع القابل للبرمجة. يتيح ما يسمى بنظام “ميرا” أيضًا إمكانية وضع متكرر لطائرة واحدة من طراز Polaris SP على مرحلة تواجه القناع ويمكنه محاذاة كاثودات المصفوفة بين حوالي 12 سم و 60 سم من مستوى القناع.
تم تصوير نظام ميرا في الشكل 1 بطائرة واحدة من Polaris SP. معظم المكونات مصنوعة من Al ، باستثناء (وعلى الأخص) البراغي الكروية الرأسية والأفقية وقضبان الدعم الرأسية المصنوعة من الفولاذ. يتم توصيل كل من البراغي الكروية بمحرك متدرج متصل بالسائق ويتم التحكم فيه باستخدام لوحة Arduino Uno.
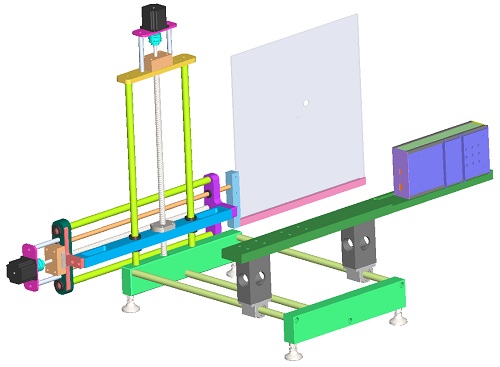

.تسمح درجتا الحرية التي توفرها البراغي الكروية العمودية بـ x ؛ y وضع قناع الفتحة المشفر ضمن 17 في 17 في المنطقة ، مدى نطاق اللولب الكروي. تتم مراقبة نهايات النطاق بواسطة مفاتيح تحديد تُعلم Arduino أن القناع ينتقل خارج النطاق عند إجراء الاتصال. يتم توفير مخطط كتلة بسيط للإعداد في الشكل 2.
Arduino code for detection of muscle fatigue and muscle growth
المراجعات
لا توجد مراجعات بعد.