
الوصف
يركز هذا البحث على تصميم روبوت عام للتطبيق في الجراحة الروبوتية ، مع إجراء الضوابط من خلال أداة تنظير البطن مع مستشعر حركة مدمج.
تمت أيضًا معالجة بيانات مستشعر الحركة وتصفيتها ومعايرتها بنجاح لإزالة إشارات الضوضاء التي تعد خطوات ضرورية قبل تطبيق الإشارات على الحركية العكسية للروبوت. جعلت تعديلات الإشارة هذه من الممكن النسخ المتماثل القريب لحركة وحدة التحكم بواسطة روبوت بأقل قدر من الخطأ.
كانت طرق المعايرة المعتمدة من مرحلتين. تحدد مرحلة المعايرة المسبقة “لاكتشاف الضوضاء” كلاً من مصادر واتساع إشارات الضوضاء من خلال التمركز وتقوم ببعض التصفية المسبقة. في وقت لاحق أثناء معالجة الإشارات في الوقت الفعلي (المرحلة الثانية) ، تمت إزالة إشارات الضوضاء المتبقية باستخدام قيمة متوسط متحرك مثالية تبلغ 5.
لإتاحة استخدام بيانات المستشعر المصفاة ، تم تصميم نموذج رياضي لتحويل البيانات الخام والمعادة من مستشعر الجيروسكوب إلى زوايا أويلر ، ومن زوايا أويلر إلى بيانات Quaternions التي يتعرف عليها الروبوت. للتحقق من صحة البيانات ، تم استخدام بيانات التوجيه المستلمة من المستشعر لحساب نقطة نهاية أداة المنظار ومقارنتها بالبيانات المستلمة من الإجراء الحركي العكسي للروبوت للتحقق من صحة العملية.
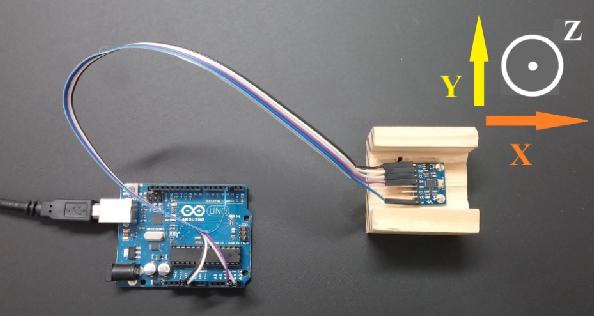
تم استخدام الاتصال التسلسلي عبر منفذ USB (الناقل التسلسلي العالمي) لنقل البيانات بين وحدة التحكم الدقيقة وتطبيق برمجي مصمم خصيصًا. كان من الممكن أيضًا استبداله بوصلة Bluetooth ولكن بسبب وزن الأجهزة وخاصة البطارية تحتاج إلى دعم الاتصال اللاسلكي المفضل لاستخدام اتصال الكابل للمستشعر.
بالإضافة إلى إنشاء اتصال بين وحدة التحكم الدقيقة والروبوت ، كان من الممكن أيضًا تسجيل وتشغيل الحركات الجراحية الديناميكية في الوقت الفعلي ، وللمراجعة اللاحقة ، كما أنه يجعل من الممكن استخدام النظام كنظام تعليم وتشغيل أو لتحليل البيانات. يمكن أيضًا حساب مسار حركات الروبوت باستخدام هذا النظام ، والذي يتم عرضه كرسم بياني مع الحد الأدنى من الاختلاف مع المسار الحقيقي للروبوت.
يتم الاتصال بين برنامج الكمبيوتر وجهاز التحكم في الروبوت من خلال TCP / IP وهو يجعل من الممكن استخدام هذا النظام عبر الإنترنت لإجراء جراحة عن بعد.

المراجعات
لا توجد مراجعات بعد.