
الوصف
وصف
كان الغرض من الدراسة هو ملاحظة آثار التغيرات السريعة في IOP في نموذج خنزير صغير عمره 3-5 أيام. تم إنشاء جهاز مسافة بادئة مخصصة للسماح بأعماق ومعدلات مختلفة للمسافة البادئة لتحقيق هذا الغرض.
من أجل تقييم التغيرات السريعة في IOP كسبب لـ RH ، تعرضت عيون الخنازير غير الناضجة البالغة من العمر 3-5 أيام (ن = 4) لسلسلة من المسافات البادئة للعين. لاختبار ظروف مشابهة لـ ODR ، تم إجراء مسافة بادئة واحدة لأعماق تتراوح من 1-7 مم بمعدلين مسافة بادئة (1 مم / ثانية و 50 مم / ثانية). تم إجراء المسافة البادئة الدورية أيضًا عند 3 هرتز لمدة 30 ثانية إلى نفس أعماق جزء المسافة البادئة المفرد للدراسة. تم اختيار التردد 3 هرتز لمطابقة وتيرة الاهتزاز المبلغ عنها في دراسات بديلة تعيد إنشاء سيناريوهات مسيئة [9]. تمت مراقبة IOP بشكل مستمر طوال المسافات البادئة باستخدام محول ضغط من الألياف البصرية (Samba Preclin 420 LP ، جوتنبرج ، السويد).
من أجل تحقيق أعماق ومعدلات مسافة بادئة منهجية وقابلة للتكرار ، تم تصميم وبناء جهاز مسافة بادئة يتم التحكم فيها بواسطة الكمبيوتر. كان جهاز المسافة البادئة قادرًا على إحداث مسافة بادئة بين 0 و 7 ملم. يمكنه إجراء اختبارات “مسافة بادئة وثبات” فردية بالإضافة إلى مسافات بادئة متكررة عند 3 هرتز. كان الجهاز صغيرًا بما يكفي لتحريكه بسهولة حول طاولة الجراحة. تم تضمين أدوات القوة والإزاحة لربط عمق المسافة البادئة وقوة ملامسة العين مع IOP الناتج.
تم إنشاء تشغيل إندينتر من خلال إرفاق رف وترس (Stock Drive Products ، New Hyde ، NY) بمحرك متدرج يتحكم فيه متحكم Arduino (Uno R3 ، IDE 1.0.5 ، إيطاليا). كان متصلاً بالحامل محول طاقة بقوة 10 أرطال (LSB200 ، Futek ، Columbus OH) والذي تم توصيله بطرف من الفولاذ المقاوم للصدأ بقطر 4 مم.
طرف الفولاذ المقاوم للصدأ.
كان طرف المسافة البادئة مسطحًا مع حواف مستديرة لتلامس العين بشكل موحد دون الإضرار بالصلبة. تم إرفاق المحول التفاضلي الخطي المتغير (LVDT) (سلسلة Transtek 240 ، Ellington ، CT) بالجانب غير ذي المسافة البادئة للحامل لقياس عمق المسافة البادئة بدقة (الشكل 20). تم جمع البيانات من مستشعر ضغط الألياف البصرية ، LVDT ، ومحول الطاقة بشكل مستمر عند 300 هرتز باستخدام نظام الحصول على البيانات (National Instruments NI 9201 ، أوستن ، تكساس) ، وتم تخزينها على كمبيوتر محمول Dell (Round Rock ، TX).
تم تجهيز جهاز المسافة البادئة بمصدر الطاقة الخاص به والدائرة لتنظيم الجهد لكل من Arduino و LVDT والمحرك السائر. لوحة قيادة محرك متدرج (Big Easy Driver ، Sparkfun ، Boulder ، CO) تعمل بالطاقة والتحكم في محرك السائر. تم إنشاء كود Arduino المخصص بواجهة مستخدم بسيطة للتحكم في السرعة والاتجاه (للأمام والخلف) وعمق طرف المسافة البادئة.
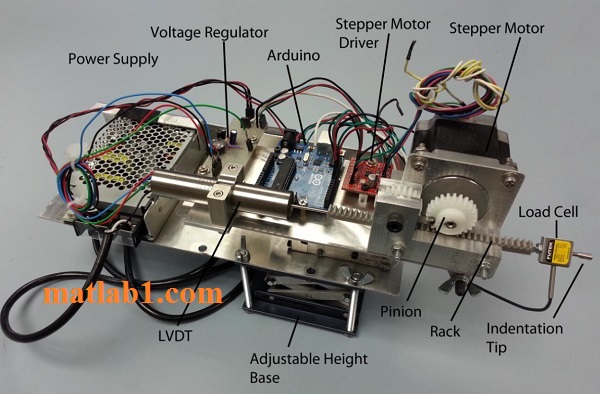
تم تجهيز الجهاز بقوس مفصلي قفل لضبط الزاوية التي يحدث عندها المسافة البادئة. تم تضمين برغي ملولب دقيق للسماح بالتقدم الدقيق لطرف المسافة البادئة. تم تركيب المجموعة بأكملها على قاعدة قابلة للتعديل لتسهيل الاستخدام على ارتفاعات مختلفة.
MATLAB ورمز متحكم دقيق للتحكم في مكيف الهواء

المراجعات
لا توجد مراجعات بعد.