
الوصف
يوفر هذا المشروع تحليلًا تجريبيًا لتأثيرات محاكاة الغبار القمري على قدرة جهازي استشعار مختلفين لتوفير بيانات لتطبيقات الملاحة الروبوتية المستقلة وتطبيقات تجنب العقبات على القمر. المستشعران اللذان تم فحصهما هما Microsoft Kinect لجهاز Xbox 360 ، وهو مستشعر عمق الضوء المنظم ؛ و Hokuyo UTM-30LXEW ، مستشعر عمق المسح الضوئي.
يتم تقسيم بيانات lidar التي يتم مسحها ضوئيًا إلى مجموعتين: الأولى صدى البيانات فقط لمحاكاة مستشعر صدى واحد ، وبيانات الصدى الأخيرة لمراقبة فعالية وظيفة الصدى المتعدد. تم إعداد خمسة سيناريوهات اختبار لاستيعاب مختلف الأحجام والمسافات المستهدفة. تم إجراء الاختبار على مستويات غبار متعددة للمقارنة بحالة مرجعية ، أي عدم وجود غبار ، لكل سيناريو. يتم استخراج ما مجموعه ثماني طائرات مستهدفة لكل مستوى من مستويات الغبار هذه من مجموعات بيانات المستشعرات الثلاثة المختلفة وتحليلها بحثًا عن الأخطاء. يتم تحديد الدقة من خلال النسبة المئوية للهدف المرئي ومتوسط المسافة إلى المستوى المستهدف مقارنة بالحالة المرجعية.
PCD_WRITER
انتهى البرنامج من تسجيل العدد المطلوب من الصور من Kinect ، يُعطى المستخدم خيار إما إدخال رقم جديد لتسجيل الصور الإضافية المقابلة أو إدخال الصفر للخروج.
PCD_READER
يسمح برنامج مخصص آخر يسمى PCD_Reader للمستخدم بفتح ملف سحابة نقطية بعد عملية التسجيل لتقييم الصورة وتحديد ما إذا كانت مرضية.
PCD_ANALYZER
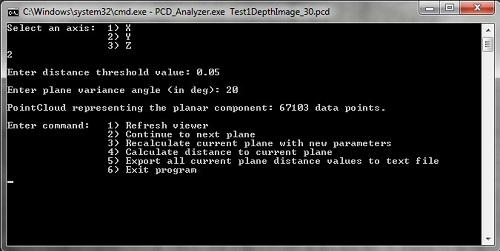
تم تحليل جميع صور العمق من lidar و Kinect باستخدام نفس البرنامج: PCD_Analyzer. هذا برنامج مخصص آخر يستخدم PCL للتعامل مع بيانات عمق السحابة النقطية. يتطلب الأمر وسيطة سطر أوامر واحدة ، وهو اسم ملف الصورة المراد معالجتها ، ويستخدم خوارزمية RANSAC لاستخراج الكائنات المستوية. بمجرد تحميل الملف ، يُطلب من المستخدم إدخال ثلاث معلمات: المحور الذي يكون المستوى المطلوب متعامدًا عليه ، وقيمة عتبة المسافة ، وزاوية تباين المستوى.
سيؤدي عتبة المسافة الأعلى إلى تضمين نقاط من مسافة أبعد أمام الطائرة وخلفها في البيانات التي تم إرجاعها ، مما يسمح بمستوى هدف أكثر سمكًا. تحدد زاوية التباين المستوي عدد الدرجات التي يُسمح لزاوية المستوى بإزاحتها عن العمودي على المحور. تحاول الخوارزمية العثور على مستوى يطابق الخصائص المتوفرة ثم تقدم للمستخدم قائمة بخيارات أوامر متنوعة. يتم إعطاء لقطة شاشة لنافذة سطر الأوامر توضح خيارات القائمة في الشكل 1.
يحتوي هذا الرمز على مستند (124 صفحة) يصف الخوارزمية والدائرة بالتفصيل.
Arduino code for a programmable mask positioning system

المراجعات
لا توجد مراجعات بعد.