
الوصف
نستخدم فيولا وجونز ديتكتور [7] لاكتشاف إشارات المرور.
الخوارزمية
1) الميزات
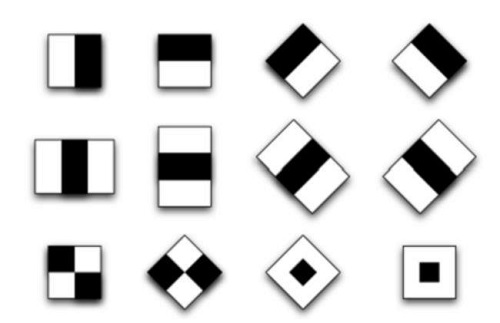
تقترح فيولا وجونز استخدام مستخرج ميزة تشبه Harr لاستخراج الميزات:
؟؟؟؟؟؟؟ = Σ ؟؟؟؟؟؟ ؟؟ ؟ ℎ ؟؟؟ – Σ ؟؟؟؟؟؟ ؟؟ ؟؟؟؟؟
ثم نقوم بتطبيع الميزات لجعلها لها معيار 1:
؟؟؟؟؟؟؟ = ؟؟؟؟؟؟؟ / ؟؟؟؟؟ ؟؟ ؟ ℎ؟ ؟؟؟؟؟؟؟ ؟؟؟؟؟؟
وفقًا لـ Viola et al. ، بالنسبة لنافذة ميزة 24 × 24 ، يمكننا استخراج ما يقرب من 160.000 من أبعاد الميزات.
2) التصنيف
160،000 سمة الأبعاد هي عدد كبير. فيولا وآخرون. افترض في الورقة أن جزءًا صغيرًا فقط من هذه الميزات مفيد وأن المشكلة الرئيسية هي كيفية العثور على ميزات مفيدة لهذا الجزء الصغير. يعد مصنف Adaboost خيارًا مناسبًا ، لأن هذا المصنف لديه إمكانيات اختيار الميزة. مبدأ Adaboost هو بناء مصنف قوي متصل بالتوازي بواسطة متعلمين ضعفاء متعددين. يقوم كل متعلم ضعيف بضرب نتيجة التصنيف الخاصة به بالأوزان وفقًا لدقتها الخاصة. الناتج النهائي هو مجموع مخرجات المصنفات. يمكن أن تكون دقة التصنيف لكل مصنف ضعيف منخفضة جدًا ، لكن دقة المصنف القوي بالكامل عالية جدًا.
لا يزال مصنف adaboost التقليدي مستهلكًا للوقت. فيولا وآخرون. تعديل مبتكر لمصنف adaboost إلى سلسلة من العديد من المصنفات adaboost. كل مصنف لديه معدل إيجابي حقيقي مرتفع (حوالي 99٪) ، بينما المعدل الإيجابي الكاذب مرتفع أيضًا (حوالي 50٪). ومع ذلك ، إذا قمنا بتسلسل 20 مصنف adaboost الصغير ، فإن المعدل الإيجابي الخاطئ سيصبح (50٪) 20 = 9.5 × 10−7 ، بينما يظل المعدل الإيجابي الحقيقي مرتفعًا.
3) تحسين الكفاءة عن طريق حساب صورة متكاملة

[7] فيولا ب. ، أند جونز م. (2001). الكشف السريع عن الأشياء باستخدام سلسلة معززة من الميزات البسيطة. في رؤية الكمبيوتر والتعرف على الأنماط ، 2001. CVPR 2001. وقائع مؤتمر جمعية الكمبيوتر IEEE 2001 في (المجلد 1 ، ص. I-511). IEEE.
Python code for Vehicle Make Detection by Convolutional Neural Networks
https://en.wikipedia.org/wiki/Traffic-sign_recognition
المراجعات
لا توجد مراجعات بعد.