
الوصف
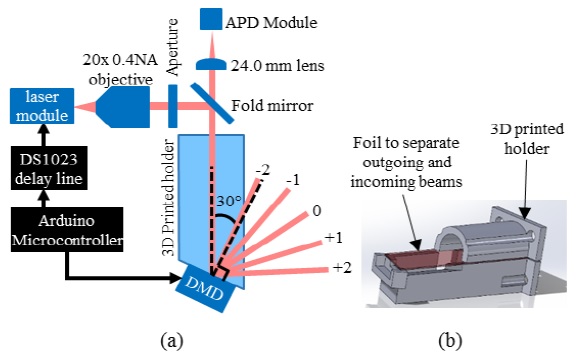
لإجراء قياسات TOF ، تمت إضافة الثنائي الضوئي الانهيار الجليدي (APD) (C12702 ، Hamamatsu) ومرآة قابلة للطي إلى الإعداد البصري كما هو موضح في التخطيطي في الشكل 1 (أ). تمت إضافة حامل مطبوع ثلاثي الأبعاد لتقليل الحديث المتبادل بين إرسال واستقبال التمريرات الضوئية كما هو موضح في الشكل 1 (ب).
كما هو موضح في الشكل 1 (أ) ، تنتقل نبضة الليزر من هدف الموازاة عبر فتحة قابلة للتعديل ويتم توجيهها بواسطة مرآة قابلة للطي على DMD بزاوية سقوط 30 درجة.
يتتبع الضوء المنعكس هذا المسار عبر DMD إلى APD. يظهر الإعداد البصري المادي الكامل لنظام LIDAR في الصورة في الشكل 2.

http://ecars.inoe.ro/wp-content/uploads/2016/05/ECARS_2016_vf_optics_ver1.pdf
المراجعات
لا توجد مراجعات بعد.